
Deployment and Development of a Cognitive Teleoreactive Framework for Deep Sea Autonomy.
Christopher Thierauf, IEEE/MTS OCEANS 2025.
Can we make deep-sea robots smart enough to act on their own?
This summarizes a recent publication and presentation I made at IEEE/MTS OCEANS 2025, which you can read here. The source code is not yet available while development continues, but this page will be updated when it is.
Why We Need Something New
When I first started working with AUV Sentry, the fully autonomous and untethered asset within NDSF, I observed that the existing software stack for planning and running missions (the MC system) was a reliable workhorse. It could execute preplanned “lawnmower” surveys effectively, and Sentry’s expert operators are familiar enough with its various MATLAB scripts that they can manually produce more complex trajectories, too.
But, sometimes mission parameters need to change. I’ve see cases of hydrothermal plume appearing that we wish we could investigate further, or operators observing an external danger we need to avoid, or hardware failures that force an end to the mission (even though the hardware could feasibly adapt to the new conditions). In these cases, MC fails. The architecture simply wasn’t built for real-time reasoning or flexible retasking. That prevents us from recovering from certain failure cases, and prevents us from collecting adaptive scientific data.
That’s where DINOS-R comes in. I designed it as a new mission planning and control architecture, inspired by the state of the art in cognitive systems but engineered for deep-sea reliability.
The problem with MC isn’t reliability: it has survived more than 700 dives. But that’s because we tightly constrain each dive, so the problem is adaptability. Every mission is hand-crafted by experts in MATLAB, converted to command strings, and uploaded. That meant:
- No adaptive sampling. If Sentry found something interesting mid-dive, it can’t investigate.
- No real-time retasking. Operators can’t safely redirect it during a mission.
- Opaque behavior. If it did something odd, we can’t ask why.
- No guarantees. Safety bounds are enforced by habit and experience, not by provable reasoning.
Workarounds existed, but they were brittle, risky, and slow.
DINOS-R: A Cognitive Teleoreactive Architecture
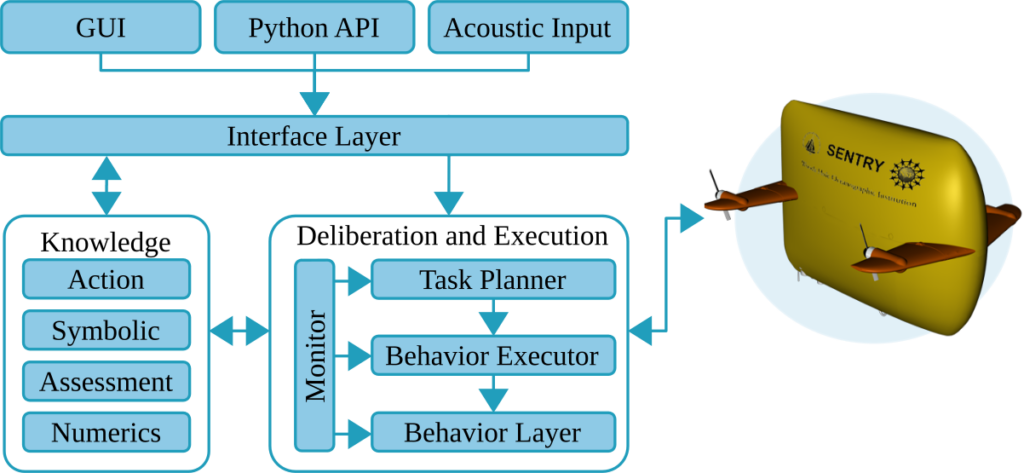
DINOS-R blends ideas from cognitive architectures (mainly DIARC [1]) with teleoreactive control (mainly T-REX [2]) into something field-ready. The key features are:
- Symbolic reasoning with reactive execution. Plans are described in terms scientists understand (“survey zone A”), not low-level control. DINOS-R automatically grounds these into concrete actions.
- Integrated failure reasoning. If something goes wrong, it can halt, diagnose, and mitigate within its own planning framework.
- No strict “plan vs. execution” phases. Anything you can specify on land, you can also inject mid-dive. That’s crucial when you can’t just bring the robot back to the surface.
- Accessible to non-experts. Instead of niche languages like NDDL, mission specification is done in Python — easy for ocean scientists and engineers alike.
The result is a flexible, interpretable decision-making framework without making operators learn new obscure tools.
First Field Deployment
We tested DINOS-R both in simulation and at sea on Sentry dive 768 in March 2025.
Simulation as a digital twin. While Sentry ran legacy MC missions, DINOS-R mirrored them in Gazebo, letting us validate plans in real time.
Real-world mission. We gave DINOS-R a high-level goal: perform a full multibeam survey of a region. It generated descent, calibration, survey tracklines, and ascent behaviors automatically. For safety, we swapped in a path from a previous dive, but the architecture showed it could plan end-to-end.
Dynamic override. Thirty minutes before the end of the survey, we sent an acoustic command to abort. DINOS-R re-planned on the fly: dropping weights, re-orienting thrusters, surfacing safely.
These tests demonstrated that the core principles worked. It produced behavior sequences equivalent to handcrafted ones, while also operating in a more flexible framework.
Why It Matters
Deep-sea exploration is expensive, risky, and limited by dive windows. By making AUVs like Sentry adaptable, interpretable, and retaskable, DINOS-R could save entire dives and let scientists respond to discoveries in real time.
This is a step toward treating AUVs less like programmable tools and more like collaborative partners that can trust to improvise safely when the ocean doesn’t go as planned.
What’s Next
DINOS-R is still under development, but here’s where it’s heading:
- A GUI and API so scientists can plan missions or even run “backseat driver” algorithms without going through operators.
- Open-source release to support other AUV platforms
- Integration of temporal logics and model checkers (LTL, PRISM, SPIN) for safety guarantees.
- Future multi-agent deployments, so multiple AUVs can collaborate mid-mission.